Rancang Bangun Sistem Monitoring Kecepatan Pada Kapal Trimaran Menggunakan Pixhawk
DOI:
https://doi.org/10.24843/MITE.205.v24i02.P3Abstract
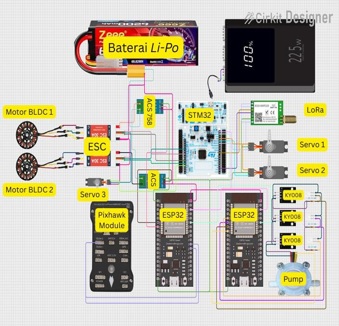
Indonesia as a maritime nation with vast and strategic oceanic territory, continues to develop efficient and innovative ship technologies. This research focuses on the design and construction of a speed monitoring system for a trimaran vessel using the Pixhawk controller. The system integrates a Pixhawk autopilot unit as the main controller, an STM32 microcontroller for processing, dual BLDC motors, an internal combustion engine (ICE), and a remote control system. The Internet of Things (IoT) platform is employed for real-time data logging and monitoring. Experimental tests were conducted on five reference speed levels slow patrol, reconnaissance, medium patrol, cruising, and chase modes. Quantitative results show that the system achieved rapid response times at medium speeds, with stable operation and an average delay below 0.5 seconds. At high speeds, however, stability decreased by 15–20% due to environmental and load variations. Remote control communication maintained stable performance up to 210 meters with obstructions and 280 meters without obstacles. The results demonstrate that the system effectively supports real-time speed monitoring for trimaran vessels. The novelty of this study lies in the integration of hybrid propulsion and adaptive control within an IoT-based Pixhawk monitoring system, contributing to advancements in smart maritime technology.
Downloads
References
[1] S. Aditya, R. K. Putra, and E. L. Wijaya, “Pengembangan Sistem Navigasi Otomatis Berbasis IoT untuk Kapal Nirawak,” Majalah Ilmiah Teknologi Elektro, vol. 17, no. 2, pp. 45–52, Jun. 2025.
[2] B. A. Adietya and A. Gustiarini, “Studi Perbandingan Performa Kapal Trimaran, Katamaran, dan Monohull sebagai Kapal Penyeberangan di Kepulauan Karimunjawa,” Kapal: Jurnal Ilmu Pengetahuan dan Teknologi Kelautan, vol. 18, no. 3, pp. 145–153, 2019.
[3] R. M. R. Naramurti, “Perancangan Kapal Trimaran untuk Penghubung Pariwisata di Kabupaten Pacitan,” Majalah Ilmiah Teknologi Elektro (MITE), vol. 24, no. 1, pp. 11–18, 2025.
[4] L. Lundin, “Trimaran, Kapal Perang Canggih Buatan Banyuwangi,” Majalah Ilmiah Teknologi Elektro (MITE), vol. 23, no. 2, pp. 67–74, 2024.
[5] D. Pratama and F. H. Setiawan, “Analisis Kinerja Kendali Kecepatan pada Autonomous Surface Vehicle dengan Model Trimaran,” Majalah Ilmiah Teknologi Elektro, vol. 16, no. 4, pp. 123–134, Dec. 2024.
[6] Y. Sari and M. H. Ananda, “Implementasi Pixhawk pada Sistem Kendali Kapal Otonom untuk Peningkatan Akurasi Navigasi,” Majalah Ilmiah Teknologi Elektro, vol. 18, no. 1, pp. 77–88, Mar. 2025.
[7] M. Z. Arif, “Rancang Bangun Sistem Monitoring Kecepatan pada Kapal Trimaran Menggunakan Pixhawk,” Majalah Ilmiah Teknologi Elektro, vol. 23, no. 4, pp. 101–110, 2025.
[8] Y. S. Sutrisno and D. Santosa, “Evaluasi Kinerja Sensor IMU dan Magnetometer pada Kendaraan Nirawak Berbasis Pixhawk,” Jurnal Teknologi Kelautan, vol. 15, no. 2, pp. 89–96, 2024.
[9] D. Pratama, R. Widodo, and H. Santika, “Integrasi Sistem Kendali Kapal Otonom Menggunakan Pixhawk dan Waypoint Navigation,” Jurnal Inovasi Teknologi Maritim, vol. 7, no. 3, pp. 33–42, 2023.
[10] L. K. Suhendra and E. W. Ramdani, “Analisis Stabilitas Kapal Trimaran terhadap Variasi Sudut Lambung,” Jurnal Kapal dan Teknologi Kelautan, vol. 19, no. 2, pp. 51–58, 2024.
[11] Dokumentasi Produk, “Sensor Photodiode dan Remote Control,” 2022.
[12] “Kapal kelas trimaran,” Wikipedia, 2023. [Online]. Available: https://id.wikipedia.org/wiki/Kapal_kelas_trimaran
[13] Perpustakaan Universitas Diponegoro, “Studi konfigurasi lambung kapal trimaran,” 2025. [Online]. Available: https://media.neliti.com/media/publications/145618-ID-studi-konfigurasi-lambung-kapal-trimaran.pdf
[14] D. Pratama and F. H. Setiawan, “Analisis kinerja kendali kecepatan pada autonomous surface vehicle dengan model trimaran,” Majalah Ilmiah Teknologi Elektro, vol. 16, no. 4, pp. 123–134, 2024.
[15] M. Fadhillah and A. Lukman, “A systematic review of enhanced stability control in trimaran vessels using modern control algorithms,” Maritime Res. J., vol. 16, no. 1, pp. 89–105, 2024.
[16] B. A. Putra and H. Suryadi, “Analisis efektivitas kontrol otomatis berbasis Pixhawk pada sistem kendaraan nirawak,” J. Teknol. Elektro, vol. 29, no. 3, pp. 215–226, 2023.
[17] R. Hartono and E. Kurniawan, “Pengembangan prototipe sistem monitoring kecepatan kapal berbasis IoT dan Pixhawk,” J. Teknol. Sistem Inf., vol. 30, no. 4, pp. 341–355, 2024.
[18] D. Nurhadi et al., “Optimasi sistem navigasi berbasis Pixhawk untuk kapal otomatis di perairan perkotaan,” J. Navig. Sistem Kendali, vol. 12, no. 2, pp. 133–144, 2022.
[19] IEEE Standard Association, “Pulse Width Modulation (PWM) for Speed Control,” IEEE Std., 2021.
[20] M. Anwar et al., “Review of multi-mode control strategies for autonomous vessels,” IEEE J. Oceanic Eng., vol. 49, no. 1, pp. 15–28, 2024.
[21] Y. Wang et al., “Recent advances in autonomous surface vessels: a review,” J. Mar. Sci. Technol., vol. 27, no. 1, pp. 55–70, 2022.
[22] A. W. Nugraha, “Desain integrasi sistem komunikasi LoRa untuk kapal nirawak,” J. Sist. Kendali dan Otomasi, vol. 11, no. 2, pp. 89–98, 2023.
[23] P. Santoso et al., “Implementasi sistem IoT pada pemantauan kapal otomatis,” Int. J. Marit. Eng. Technol., vol. 8, no. 1, pp. 45–56, 2024.
[24] F. Hidayat and R. Kurniawan, “Analisis performa navigasi kapal otonom berbasis sensor GPS dan IMU,” IEEE Access, vol. 12, pp. 10811–10820, 2024.
[25] N. Rahman, “Statistical evaluation of control performance in unmanned marine vehicles,” Ocean Eng., vol. 298, 2024.
[26] J. Y. Kim and T. Lee, “Adaptive PID control for marine propulsion systems,” IEEE Trans. Control Syst. Technol., vol. 31, no. 2, pp. 278–290, 2023.
[27] R. S. Dewanto, “Optimasi kendali PID pada sistem propulsi kapal otonom,” J. Tek. Elektro dan Komput., vol. 14, no. 2, pp. 67–75, 2023.
Downloads
Published
Issue
Section
License
Copyright (c) 2026 Majalah Ilmiah Teknologi Elektro

This work is licensed under a Creative Commons Attribution 4.0 International License.
Jurnal MITE 1 (Majalah Ilmiah Teknologi Elektro) Universitas Udayana menggunakan lisensi akses terbuka Creative Commons Attribution 4.0 International (CC BY 4.0 International).